








Welcome to the Chair of Multibody Dynamics
The design of mechanical systems under the effect of dynamic loads represents a central and decisive point in the design process of complex machines and systems. In the context of increasing loads, the prevailing trend towards lightweight construction and continuous optimisation, the focus is shifting to investigations with high mapping quality of the transient system behaviour to exploit potential reserves, whereby interactions with other field problems must be taken into account in addition to the classic structural dynamic properties.
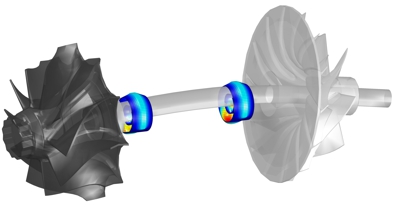
The subject area of fluid-structure coupling comprises the modelling of the overall system (modelling as a multi-body system is suitable for general transient loading and spatial movement), taking into account the non-linear interactions between the mechanical structure and the influencing fluid. One focus here is on the modelling of hydrodynamic plain bearings, whose behaviour is per se non-linear and which are therefore the cause of potential instabilities. This is accompanied by the primarily numerical analysis of the descriptive Reynolds differential equation as well as the energy equation and its reaction-related influences on the mechanical structure, which can be modelled both rigidly and elastically.
Due to the holistic description, non-linear vibration effects (e.g. oil whirl, oil whip) can be analysed with regard to their causes, predicted in amplitude and frequency and measures for reduction can be developed.
In organisational terms, we are part of the Institute for Materials, Technologies and Mechanics (IWTM) at the Faculty of Mechanical Engineering.
The “Magdeburger Verein für Technische Mechanik e. V.”(MATEM) was founded in 1994 by employees of the Institute of Mechanics (IFME) and graduates of the Applied Mechanics course. Among other things, it serves to promote science and research as well as teaching in education and training in the field of mechanics. The association publishes the scientific journal “Technical Mechanics”

{kind=link}